 УСТРОЙСТВО И ПРИНЦИП РАБОТЫ ДАТЧИКА ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ
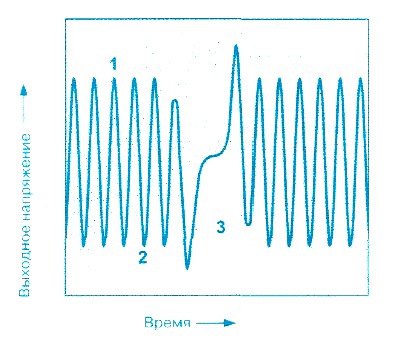
УСТРОЙСТВО И ПРИНЦИП РАБОТЫ ДАТЧИКА ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯДатчик монтируется напротив ферромагнитного импульсного колеса 7 (например, маховик коленчатого вала), рисунок 8, и отделен от него воздушным зазором. Датчик содержит мягкий железный сердечник 4 (полюсный наконечник), который окружен катушкой индуктивности 5. Полюсный наконечник соединен с постоянным магнитом 1. Магнитное поле проходит через полюсный наконечник внутрь импульсного колеса. Интенсивность магнитного потока, проходящего через катушку, зависит от того, что нахо-дится напротив датчика зуб или паз (отверстие) импульсного колеса. Зуб вызывает усиление, а паз, наоборот, ослабление интенсивности магнитного потока. Эти изменения наводят (индуцируют) в катушке электродвижущую силу (ЭДС), выражаемую в синусоидальном выходном напряжении, рисунок 9, которое пропорционально частоте вращения вала. Амплитуда переменного напряжения сильно растет с увеличением частоты вращения (от нескольких мВ до 100 В). Достаточная для регистрации датчиком амплитуда напряжения возникает, начиная с частоты вращения вала, равной 30 мин-1.
Геометрические формы паза (отверстия) и полюсного наконечника должны соответствовать друг другу. Система обработки сигналов преобразует выходное напряжение с импульсами синусоидальной формы с переменной амплитудой (аналоговый синусоидальный сигнал) в напряжение с импульсами прямоугольной формы с постоянной амплитудой (цифровой сигнал). Аналого-цифровое преобразование осуществляется в микропроцессоре блока управления.
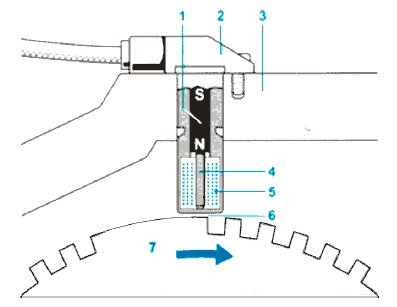
1 - постоянный магнит;
2 - корпус датчика;
3 - картер маховика;
4 - полюсный наконечник;
5 - катушка индуктивности;
6 - воздушный зазор;
7 - импульсное колесо с опорной меткой (маховик)
1 – зуб;
2 – паз (отверстие) между зубьями;
3 – опорная метка
ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ КОЛЕНЧАТОГО ВАЛА
Датчик частоты вращения коленчатого вала, также называемый датчиком скорости двигателя или датчиком синхронизации, установлен в верхней части картера маховика с правой стороны, если смотреть со стороны маховика.
С помощью датчика частоты вращения коленчатого вала определяется частота вращения и угловое положение коленчатого вала (положение поршня) относительно верхней мёртвой точки (ВМТ) в цилиндрах двигателя. Используя информацию с датчика, ЭБУ двигателя рассчитывает начало подачи и количество впрыскиваемого топлива для каждого отдельного цилиндра.
Частота вращения рассчитывается по времени периода импульсов датчика.
Сигнал датчика частоты вращения - одна из самых важных величин для системы электронного управления двигателем.
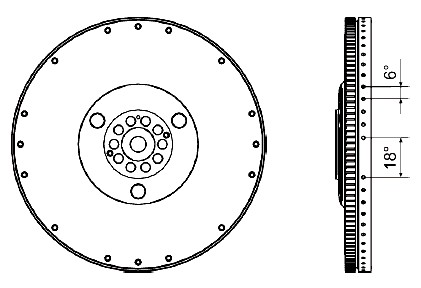
 Импульсное колесо датчика одновременно является маховиком, на наружном диамет-ре которого имеются 58 (60 минус 2) радиальных отверстий, расположенных через 6°, рису-нок 11. Пробел в 18° (два отсутствующих отверстия) является базовой меткой и служит для определения углового положения коленчатого вала двигателя в пределах 720° и увязан с определенным положением коленчатого вала по отношению к ВМТ первого цилиндра. Маховик ориентирован с помощью штифта и закреплен на коленчатом валу.
Маховик
ХАРАКТЕРИСТИКА ДАТЧИКА
Сопротивление катушки при 20°С: Rw = 860 Ом ±10%;
Индуктивность на частоте 1 кГц (последовательное подключение): 370 ± 60 мГн (без намагничивающихся деталей крепежа);
Воздушный зазор (расстояние между датчиком и импульсным колесом): 0,3…1,8 мм.
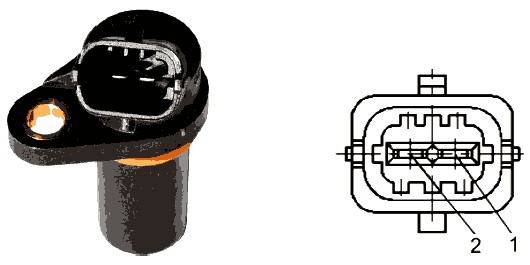
КОНФИГУРАЦИЯ РАЗЪЁМА
• Контакт 1 (провод 2.23) – ЭБУ контакт 2.23 масса датчика;
• Контакт 2 (провод 2.19) – ЭБУ контакт 2.19 выходной сигнал
|